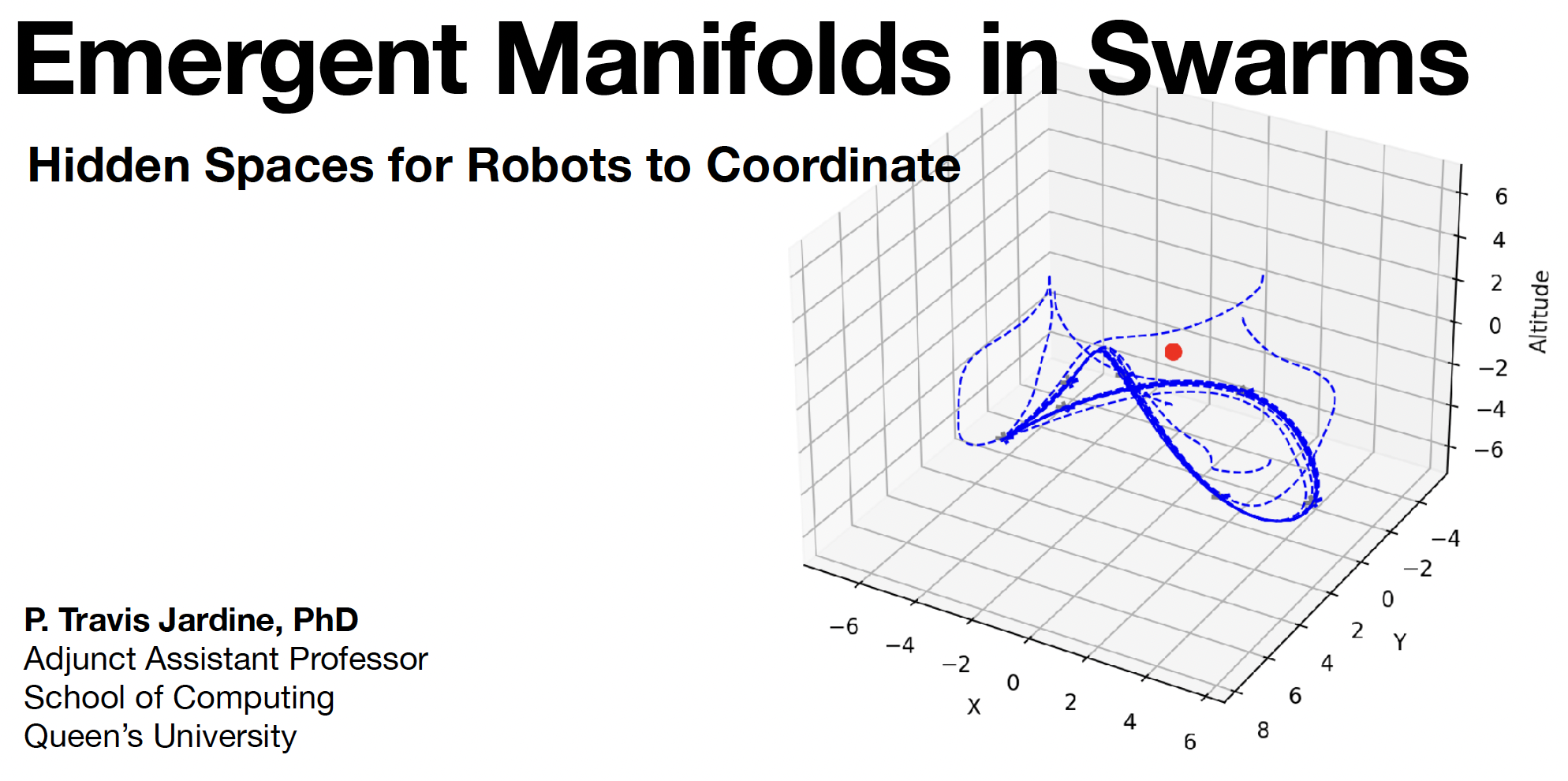
I recently had the pleasure of presenting our work at the 2026 Ingenuity Labs Research Institute Multi-robots Workshop. We explored a central theme across our research: when integrated within a control-theoretic framework, machine learning can enhance the performance of physical systems while preserving formal guarantees of stability and robustness. Specifically, we discussed how the swarm embeddings proposed in our recent work can be reframed as equilibrium manifolds to ensure swarms can maintain coherence and stability while learning to adapt to their environment.
In a proof-of-concept, we showed how Continuous Action Learning Automata can be used to learn the optimal orientation (azimuth and altitude angle) of the embedding plane. Implementation details can be found here.
After a series of related talks, I was joined by colleagues Kleber Cabral, Jean-Alexis Delamer, and Melissa Greeff for a fun panel discussion on the state-of-the-art in robotics research.